

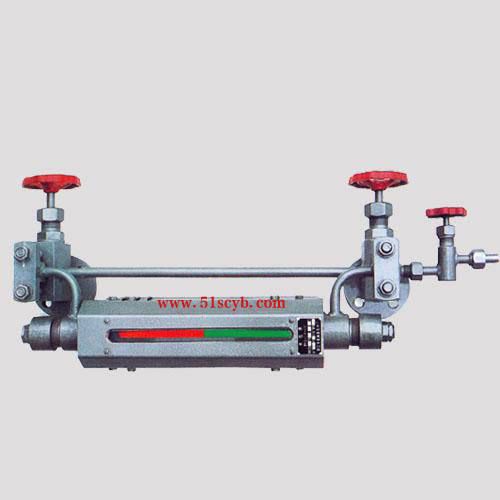
淺析船用B49H型平板鍋爐水位計自動控制研究
日期:2019-09-25 來源: 作者:
摘 要:隨著我國航運業的發展,對船用設備要求日益升高。 尤其是近年來,隨著大型油輪的現代化,船舶輔鍋爐已經不僅提供船員生活所需,還承擔油路加熱、運輸等重要任務。 本文介紹了油船 D 型水管鍋爐的結構特點,分析了其燃燒的特點和其自動化控制,以及汽包水位在不同擾動下的動態特性。 根據已有的鍋爐汽包水位自動控制方法,提出控制汽包水位程序化的思路,并且用 vb 程序進行初步的程序化設計實現。
1 B49H型平板鍋爐水位計控制特點
鍋爐汽包水位自動控制的首要任務是在非人工干預的情況下,B49H型平板鍋爐水位計控制器能夠根據鍋爐實際的運行情況,對鍋爐的進行適當的補水,以確保B49H型平板鍋爐水位計維持在一定的范圍內,保證鍋爐的正常運行。 B49H型平板鍋爐水位計過高,會影響鍋爐中的汽水分離效果,使蒸汽的濕度增加;B49H型平板鍋爐水位計過低,會使鍋爐表面的熱負荷增加,燒毀爐膛。
對于大型油船( D 型)水管鍋爐,汽包的水位不僅與給水量(給水閥的開度)有關,還與鍋爐的負荷(蒸汽流出量)有關,此外還受到汽、水的比例成分有關系。 在B49H型平板鍋爐水位計計測量出來的汽包水位當中,不僅僅代表著汽包中水的多少,而且包含著水中溶解的氣泡的容積。 這與鍋爐爐水上部的壓力有關。 筆者根據多年的實踐經驗,總結出以下四個影響汽包水位的因素:一是給水方面影響。 給水量的變化必然會引起B49H型平板鍋爐水位計的變化。 二是鍋爐蒸汽負荷的影響。 蒸汽流量增加,需要的被蒸發的水的量就一定會增加,那么隨之水位也就會減少。 三是燃料發熱量對鍋爐的影響。如果燃料的熱值增加,水蒸發的速度必然增加,那么對汽包中水的量也就會減少 [1] 。 四是汽包壓力的變化。 如果汽包的壓力改變,那么汽包水汽系統的自凝結和自蒸發也會有相應的變化。
2 給水過程的自動控制
2.1 鍋爐汽包水位的特征
由于燃料燃燒狀況對鍋爐汽包水位的影響有一定的滯后性,影響遲緩,因此忽略不計。 另一方面,汽包壓力的變化大多是由,蒸汽流量的變化而引起的,因此可以將這方面的影響歸結到鍋爐負荷的影響上去。 由此可以推出,鍋爐汽包水位在給水量和蒸汽流量的影響下的動態方程:

2.2 B49H型平板鍋爐水位計的調節方式
B49H型平板鍋爐水位計調節包括單沖量, 雙沖量和三沖量給水調節方式系統,本文主要講解三沖量給水調節方式,三沖量汽包給水自動調節系統, 是在雙沖量給水調節系統的基礎上仍然以汽包水位作為主要調節信號,蒸汽流量作為前饋信號,不同的是三沖量的給水調節系統添加了給水量調節器的反饋信號。 在大型鍋爐中,鍋爐的容量越大,汽包的容水量就越小,這樣對水位的波動情況的控制就越嚴格 [2] 。 如果給水量減小甚至中斷,危險水位可能在短時間內就會發生,如果是給水量與鍋爐負荷量不適應,也可能在短短的幾分鐘內出現滿水或者缺水事故。 因此對水管鍋爐的汽包水位控制的要求更為嚴格。
裝有三沖量汽包水位調節系統的鍋爐運行時, 當蒸汽流量突然發生變化,蒸汽流量的信號就傳給給水閥,因此給水閥始終都會按照準確的方向調節。 如果蒸汽流量增大,那么給水閥也隨之開大,避免了由于“虛假水位”引起的錯誤動作,減小了水位波動。 如果蒸汽流量減少,給水閥也隨之減小。 由于給水調節信號的存在,使得調節的結果被調節器及早知道,很好的提高了對水位變化的控制,改善了調節系統的調節品質 [3] 。
3 汽包水位控制的程序化
針對汽包水位調節的 VB 程序化設計思路,提出以下解決方案。
3.1 水位調節方法
鍋爐汽包水位調節的方法采用三沖量調節, 是在雙沖量給水調節系統的基礎上仍然以汽包水位作為主要調節信號, 蒸汽流量作為前饋信號, 不同的是三沖量的給水調節系統添加了給水量調節器的反饋信號,如圖 1 所示。

如圖所示 PID 1 是主調節器, PID 2 是副調節器。主調節器接受水位差壓傳感器的信號,并以此來控制副調節器。 副調節器不僅要接受主調節器的信號 I H , 還要接受蒸汽流量信號 I D 和給水流量 I W 組成了一個串級控制三沖量調節系統。 其中負調節器的作用是通過內回路對蒸汽流量和給水流量進行比值調節, 并快速消除給水測擾動。 主調節器通過副調節器進行水位的校正,使水位保持在給定值 [4] 。
3.2 水位調節算法
PID 調節器(及比例積分調節器)其數學表達式為:

其中 e(t)=r(t)-c(t), 是設定值 r ( t )與實際輸出值 c ( t )構成的控制偏差。 式 (2) 中 Kp 為比例系數, T i 為積分時間 ,T D 為微分時間。PI 調節中的比例調節( P )的作用是成比例的反應偏差信號,一旦產生偏差,控制器立即產生控制作用,減少偏差。積分調節 (I)的作用是消除靜態偏差, 保證在系統調節過程中的誤差度 , 微分調節( D )作用是抑制相應誤差的變化。在現在的計算機系統中,由于式( 2 )中的積分項不能直接使用,需對其進行離散化處理。 按照 PID 調節的算式,其中積分時間是連續的,因此以一系列的采樣時刻點 kT 代表連續的時間段t ,以和式代替積分,則可作出如下變換:

增量式的調節形式通俗的講就是控制的閥位是從這一時刻直接變化的而并非是和原始的比較。
3.3 程序化的實現
程序的實現只是在實現了 PID 調節的算法, 但是在實際中要想使其發揮作用還要將程序植入到 PLC 或者單片機中去,下面是 PID 調節器程序實現的代碼:


以上是 PID 控制器的程序,在主調節器中 sv 和 pv 分別是水位的設定值和實際值,而在副調節器中,實際信號則是水位輸出信號,蒸汽流量信號,給水信號的疊加量。 將其求和然后再調用PID 程序即可。在調節器中還需要設定調節范圍,調節方向,和計算機取值信號的界限,以及比例積分系數,根據以往的經驗和汽包水位的仿真整定出一組理想的 PID 參數為: K p =5 , K i =0.001 ,K d =3 ,在實際中根據計算機取值不同,保證比例系數為 5 ,則積分時間為取值周期的 5000 倍,微分時間為取值周期的 0.6 倍。 根據這樣的參數,從而使控制效果基本達到zui佳狀態。
4 結束語
本文雖然對 PID 控制的程序進行了研究, 但是對于實際應用還有很多方面未完成,例如將程序寫入什么硬件中,如何將算法制成控制器。 下一步只有將這些都完成并且經過一系列的調試才能應用到實際生產當中,實現自動控制。
上一篇文章:水煤漿磁浮子翻板液位計水系統的設計及應用下一篇文章:磁性浮子翻板液位計在工業自動上水系統中的應用

- 防腐磁翻板液位計在何種情況下需要配套四氟【2021-09-29】
- 帶遠傳磁翻柱液位計【2018-11-28】
- 防腐磁翻板液位計遇到翻柱在現場不翻轉或者【2018-09-27】
- 使用導波雷達液位計平臺自己動手解決常見問【2019-05-07】
- 如何操作浮子液位計進行丙烷儲罐液位監測【2019-04-03】
- 電廠熱力系統磁翻板液位計安裝工藝研究【2019-11-16】
- 磁翻板液位計UQC-C15【2018-09-27】
- 分析防腐磁翻板液位計裝置運行風險及管控措【2019-12-23】
- 磁翻板液位計在液氨儲槽和分離器液位監控上【2021-06-04】
- 石英管液位計帶LED燈不亮的故障排除【2020-11-16】
- 磁翻板液位計又出新作 感恩支持大酬賓【2013-09-12】
- 磁翻轉液位計測量多介質界位的標準和選購注【2021-02-04】
- 正確安裝防腐抽真空磁翻板液位計以及注意地【2018-08-08】
- 淺析船用B49H型平板鍋爐水位計自動控制研究【2019-09-25】
- 玻璃板液位計
- 磁翻板液位計與差壓液位計雙重監控分離器液位的方法
- 關于磁翻板液位計應用大型乙烯裝置冷區現場的問題
- 磁翻板液位計在海水脫硫液位測量中選擇什么材質
- 如何解決磁翻板液位計水浸問題及預防故障的措施
- 磁翻板液位計在天然氣精煉過程中的安全作用
- 油罐液位檢測校準系統的研究與設計【2020-04-13】
- 石油化工磁性浮子液位計維護管理措施【2019-11-07】
- 關于頂裝式遠傳磁翻板液位計在天然氣儲存及【2019-09-02】
- 一種高效組合工藝在某電廠含煤廢水處理系統【2019-06-06】
- 通過雷達液位計智能控制定量裝車鐵水液位測【2018-08-16】
- 全領域應用是磁翻板液位計成為主流液位計的【2016-09-21】
- 不銹鋼內襯磁翻板液位計耐腐蝕【2018-09-27】
相關的產品




















新聞動態
產品分類
推薦產品
聯系我們

公司地址 : 江蘇省淮安市金湖經濟開發區
業務聯系 : 楊經理
電話號碼 : 0517- 86998326 / 86998328
傳真號碼 : 0517- 8699 8327
手機號碼 : 18952302362